This tutorial will guide you through the process of connecting an Oak-D camera to your Leo Rover.
This tutorial will guide you through the process of connecting an Oak-D camera to your Leo Rover.
OAK-D is the ultimate camera for robotic vision that perceives the world like a human by combining stereo depth camera and high-resolution color camera with an on-device Neural Network inferencing and Computer Vision capabilities. It uses USB-C for both power and USB3 connectivity. In robotics, stereo cameras are commonly used for mapping the environment, object recognition, 3D scanning and in many other.
After completing this tutorial, you will have successfully connected an Oak-D stereo camera to the Leo Rover in ROS, and you will possess basic knowledge about the use of stereo cameras.
There are multiple use cases for stereo cameras. Since we cannot predict them all, we cannot design a perfect mount for all of them. That's why we provide a Universal Camera Mast that can fit a wide range of projects.

Whether you are using our Universal Camera Mast or your own custom solution, you'll need to connect the camera to the rover somehow.
The USB port placed on the mounting plate of the rover does not support USB 3.0 that's necessary to run the camera. That's why you'll need to connect the USB-C wire straight to the USB ports of the rovers built-in Raspberry Pi.
Kacper from our team likes to remove the micro-usb port entirely and run the wire straight through the newly created hole. This solution, combined with the use of a cable gland, keeps the MEB box waterproof.
Second common solution involves printing a new cover for the MEB box. Dev cover found here, provides a wide opening for running wires straight into the MEB. This solution can be extremely useful in projects that don't need to be waterproof.
If the camera isn't the only thing connected to the rover you might need to provide an external power connection. Powerbox might come in handy in such situations.
Add USB rules to your system
Install depthai-ros packages(only available in ROS noetic)
As we want to have the camera model visible with the rover model, we need to change robot.urdf.xacro file in /etc/ros/urdf directory. Package depthai_descriptions is installed alongside depthai-ros and it contains Oak camera models and xacro macros that we can easily add.
To include the Oak camera macro add following lines to /etc/ros/urdf/robot.urdf.xacro file.
This macro contains a lot of parameters that are set to a default Oak-D Pro camera setup on a rover. You can adjust those parameters to your needs (e.g. if you have the camera mounted in a different position or you are using a different camera model).
In the end, your robot.urdf.xacro file should look like this:
To launch the camera you can, create your own launch file, use one of the example packages from depthai-ros package or you can use the provided launch file which provides basic functionalities such as camera image and pointcloud created from depth data.
In /etc/ros create a .yaml configuration file. This example contains configuration for Oak-D Pro pointcloud mapping.
Next, also in /etc/ros create a launch file that will use the previously added configuration and will create a nodelet manager and appropriate nodelets. Nodelets are used for communication efficiency.
For more information about oak configuration and usage examples you can check out the depthai-ros github repository.
Include your launch file in the robot.launch file, so that your node will start at boot.
In /etc/ros/robot.launch add this line between <launch> tags:
Now your Oak-D camera ROS nodes will start at launch.
The topics from camera node should be now visible. You can check them with rostopic tool - topics from your node will have prefix specified by you in the camera ros argument.
If you have ROS installed on your computer, you can get the camera image with rqt, and see the robot model with camera attached using rviz.
Before starting any of the programs, make sure you completed the Connecting other computer to ROS network section of ROS Development tutorial:
Now you can start rqt, and from plugins -> visualization chose image view and then chose your topic.
You can also start rviz, and add robot model in the display view. Chose also base_link as fixed frame, and you should see the rover model with camera attached.
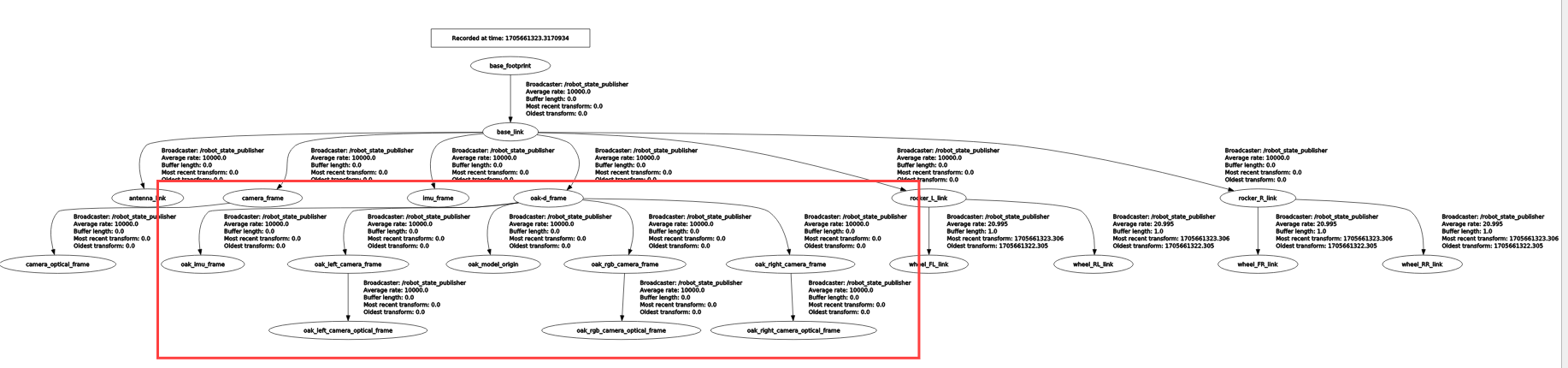
You can also display tf tree in rqt, to see if everything is configured correctly (plugins -> visualization -> TF Tree)
Stereo cameras are commonly used in projects involving autonomous navigation, you might be interested in a tutorial about it. They are however, not the only way of teaching a Leo Rover how to move on it's own. Check out our line follower tutorial if you want to learn more. You can also check our Knowledge Base for more instructions.
Find us on:
